How control works
The whole reason for Level COMMAND existing is to help you implement earthmoving designs. It seems fairly simple, but the closer you look, the more is involved. Here are some of the considerations:
When the implement is over the design and COMMAND is engaged, we send target elevation (and cross slope if enabled) information to COMMAND. Since it takes a little bit of time between reading the GPS elevations and getting the blade to the desired height, we look ahead of the current position by a little. The exact distance changes depending on your speed, so it is determined using the current speed and a small time delay, called "Look Ahead". To edit it, go to
The COMMAND diagnostics page is great to check what is being sent between Level COMMAND and COMMAND. You shouldn't normally need to look at this page, but is a great diagnostic tool should the need arise. Access the COMMAND diagnostics page by going to More 🡒 COMMAND Settings 🡒 Diagnostics (the lower left button).
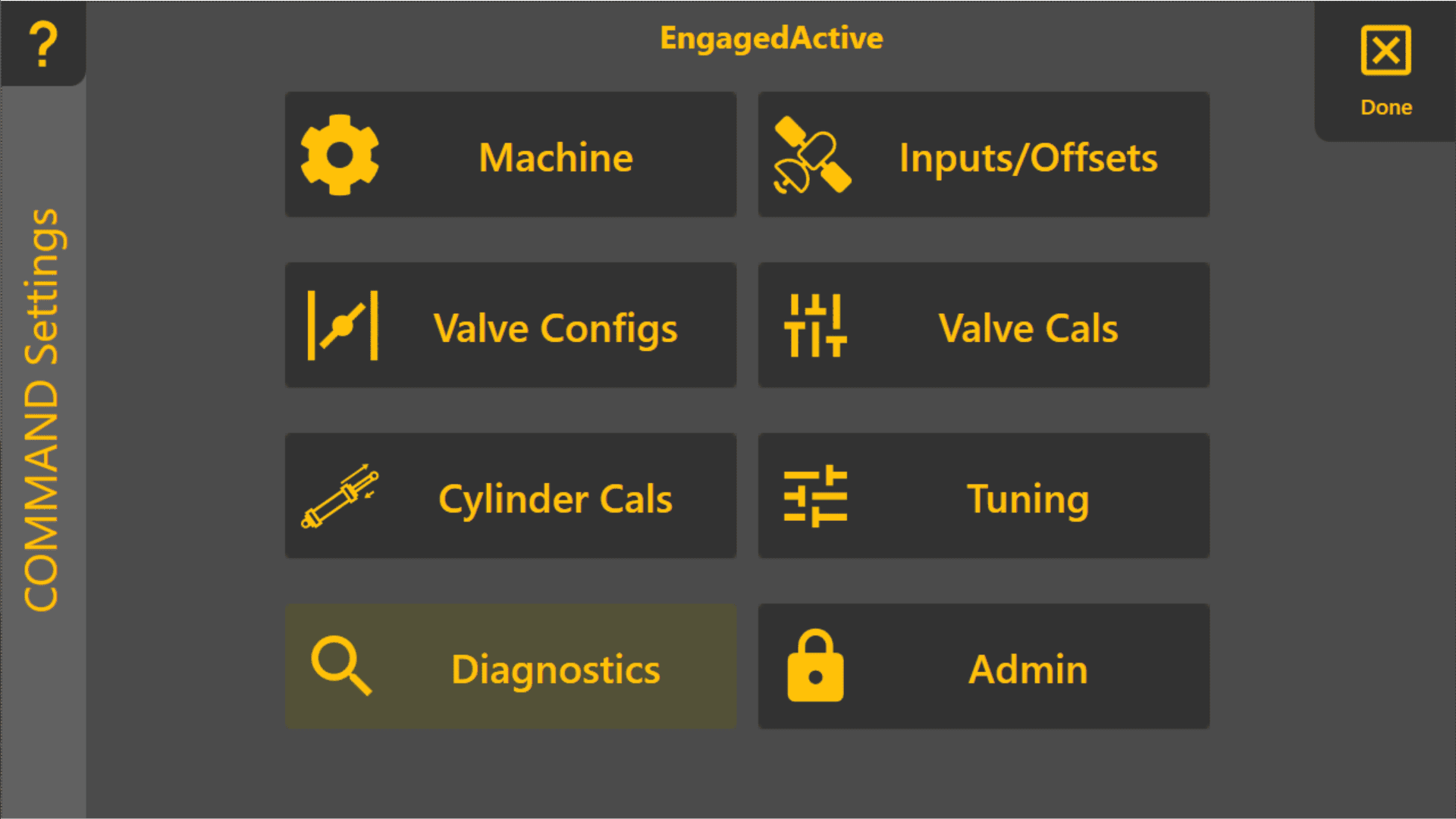
Once you're in the Diagnostics page, there are two tabs - Diagnostic Stats and Serial Viewer. Select the one you're interested in using the buttons in the bottom right of the page.
Diagnostic Stats
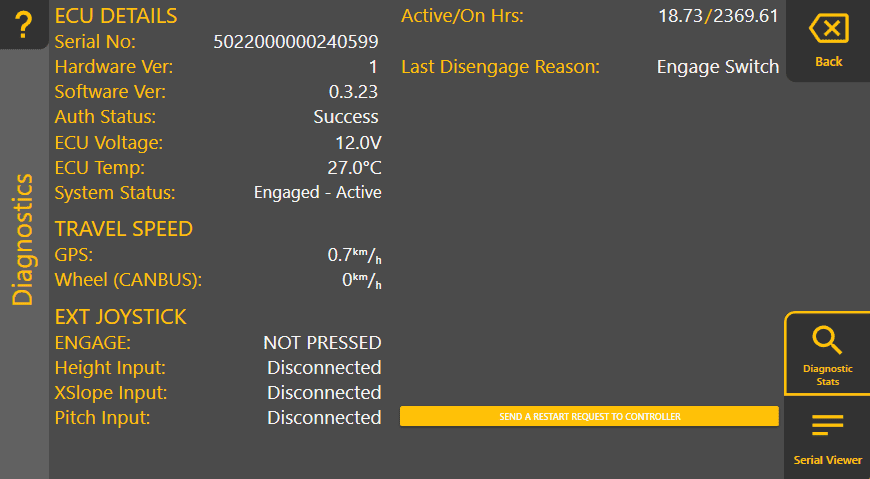
This page gives you more insight into the internal operations of COMMAND with some continuously updating measurements and statistics.
Serial Viewer
This page shows you the raw GPS (and other parameters) coming into Level COMMAND, and what we send to COMMAND. The page is divided in two. The left side displays what we've received from COMMAND. This includes GPS data, parameter values, and feedback about hardware states. The right side displays what we've sent to COMMAND. This includes setting the value of parameters and, importantly, commands to go to specific elevations and (if applicable) cross slopes.
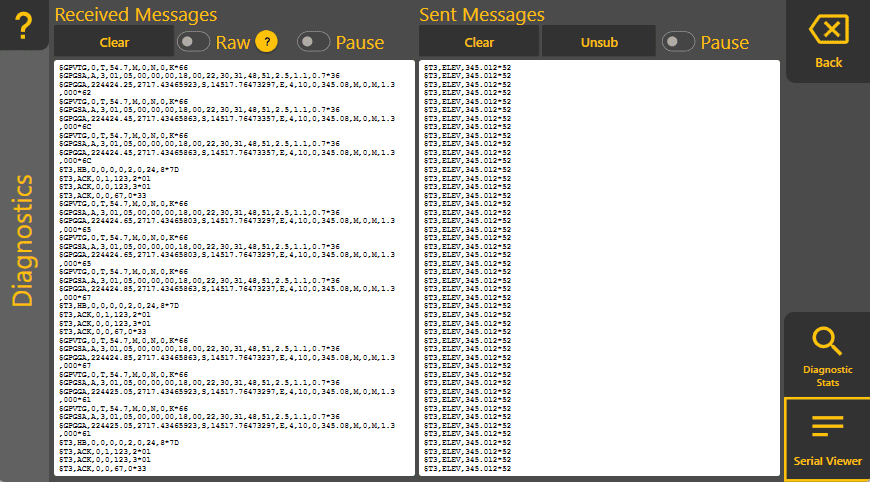
For both Received and Sent, you can clear and/or pause the feed at any time. Tapping in the text display at any time will pause it, allowing you to select text and read more easily. To get the latest data, unpause by tapping the Pause toggle at the top.
Received Messages > Raw
This will allow you to see samples of the data received by the ECU. This only reports data the ECU receives over RS232 (not CAN).
Sent Messages > Unsub
Sometimes we have a lot of values being received. To quiet the storm, you can click the 'Unsub' button.
If you're not receiving any GPS data, see Not receiving GPS / Waiting for height Cmd.
.
When the implement is off the map, a "no move" message is sent to COMMAND, making it easier when off the map hauling dirt to/from stockpiles.